Investigador da UMinho desenvolve estudo sobre parceiros robóticos neuroadaptativos
O objetivo é a criação de sistemas adaptativos e interpretáveis, capazes de decidir quando ajudar e quando agir, de forma autónoma, em tarefas partilhadas.
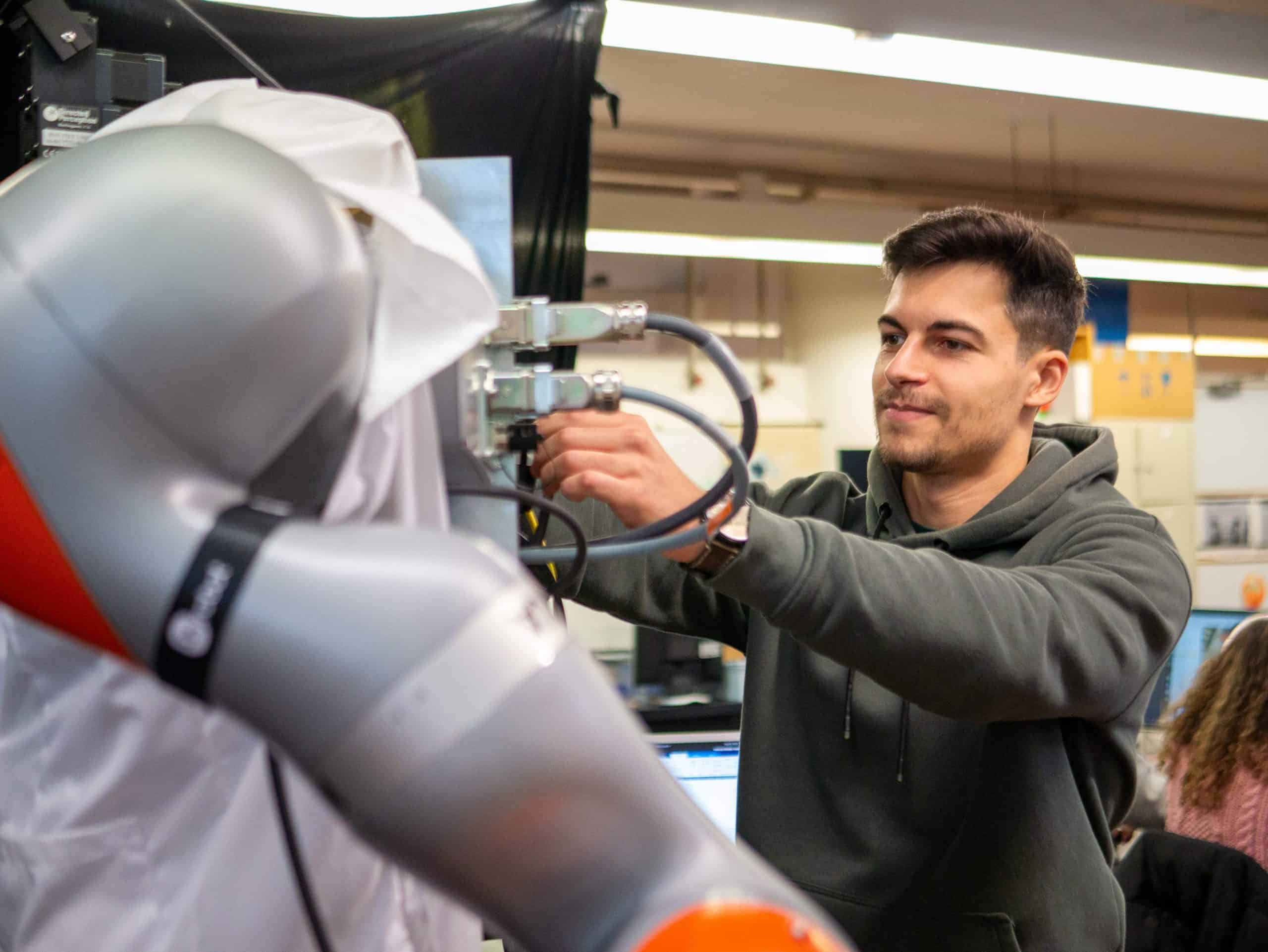
João Gaspar Cunha, investigador do Mobile and Anthropomorphic Robotics Laboratory (MarLab), do Centro Algoritmi, está a estudar a melhor forma de “traduzir comportamentos cognitivos para um modelo computacional”, de modo que, no futuro, robôs sejam capazes de colaborar autonomamente com o humano. Ainda que a sua investigação “esteja muito no início”, e não perspetive a aplicação concreta deste sistema para breve, o investigador acredita que existe potencial para que seja adotado em vários contextos.
Partindo da teoria dos campos dinâmicos neuronais, o investigador recorre a um algoritmo evolutivo, inspirado na teoria da evolução de Charles Darwin, para gerar automaticamente o ‘cérebro’ do robô. Sem que seja programado ou treinado diretamente, este sistema evolui arquiteturas internas, selecionando progressivamente as mais eficazes para a colaboração com humanos.
“O meu doutoramento tem a ver com a forma como consigo automaticamente gerar estes campos, como é que eu os devo acopular, quais é que são os parâmetros que eles devem ter, sem necessariamente defini-los à mão”, diz.
O objetivo é a criação de sistemas adaptativos e interpretáveis, capazes de decidir quando ajudar e quando agir, de forma autónoma, em tarefas partilhadas. Para isso, João Gaspar Cunha precisa interpretar as respostas do robô a certas tarefas e repeti-las sobre outros ‘cérebros’ até que surja um “que cumpra determinado comportamento de forma natural, eficiente, complementar ou assistido com o humano”.
“No início, são geradas estruturas simples e pouco funcionais, que vão sendo refinadas ao longo do processo evolutivo até emergirem comportamentos colaborativos e complementares que pretendemos. Desta forma, o robô passa a decidir quando deve agir, quando deve complementar a ação humana e quando deve permanecer inativo, permitindo uma colaboração mais natural em tarefas partilhadas”, concretiza.
No futuro, sistema pode ser aplicado em múltiplos contexto
Segundo o investigador, as aplicações, “quer sejam na indústria, quer sejam assistidas, em lares” ainda não existem, mas o “potencial está lá”.
Depois de autonomizado, o sistema pode ser aplicado “em qualquer sítio”, sendo que o contexto industrial, no apoio “a construir uma peça ou a empacotar alguma coisa” é o seu desígnio mais óbvio.
A investigação tem em vista uma nova geração de parceiros robóticos neuroadaptativos, capazes de colaboração fluida e semelhante à humana.
O projeto foi recentemente premiado com o ‘Best Innovation in HRI NeuroDesign Award’, durante a conferência internacional ‘IEEE RO-MAN’. Para o investigador, este galardão, que distingue projetos pioneiros na interação humano-robô, significa “que a comunidade científica valida a forma como estamos a tratar este problema, valida que é um problema que existe, valida que a nossa solução para ele também faz sentido”. “No fundo, isso é o que mais nos interessa, ter esta validação da comunidade científica internacional”, remata.